Update: 3/20/2012
Realize that the motor on the Genius changes quite a bit from run to run. First run of the day when is cool, is pretty powerful. After couple of minutes, it loose about 10% power. Is hard to pin down a pitch curve. These are best estimates.
----------------------------------------------------
Update: 10/13/2011
These settings are good for bench test best efficiency. However, I found that in practice, with these curves, the motor heats up more, and higher temperature cause motor to have more resistance, and less efficiency. I have since changed the curves more towards bobepine's curves to have higher head speed so motor operate more efficiently, and have less heat. His curves have slightly more flying time than mine. Maybe 10 seconds, but motor is cooler, and that is important. He has since changed his curves for better performance instead of run time, but I wrote down his previous curves. Here they are: Throttle: 0,36,65,75,100. Pitch: 52,53,54,74,100.
----------------------------------------------------
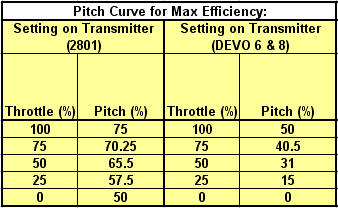
Objective here is to find the optimal pitch curve. Want the most efficient pitch curve for maximum battery life.
Note: Tom Z and bobepine has pitch settings in post here. Here is an analytical way of testing the helicopter to get the exact pitch. Results are slightly different, but similar.
Pitch Reference: On the tested stock helicopter, 100% pitch gives 20 degree of pitch. 50% pitch is 0 degree pitch. (Pushrod mounted to next to the outside hole.) For DEVO radio, 0% is no pitch, and 100% is max pitch.
How much can you gain? About 20-25 seconds. Using Tom Z's recommended beginner's curve as a reference, flying time is 4:06 minute at 3.77-3.78V. Now using this curve, flying time is 4:30 minutes at 3.77V. About 20-25 seconds longer. The second advantage is lower head speed with about the same performance. The up and down response is more or less about the same as Tom's curves, but at lower head speed. Great if flying indoor next to a flat screen TV!
An added feature of lower head speed is less vibration. Main problem with vibration is it affects the accelerometer in 6 axis mode especially if blades are not perfectly balanced. On my helicopter, at high head speed, helicopter is almost out of control in 6 axis mode. Need to fly until 3 minutes latter when battery has run down, and head speed lowers before helicopter become stable again. There is no problem using these curves at lower head speed.
-Power supply is set to 3.8V. (Measured a fresh charge battery with motor running, and is 3.8V.)
-Helicopter is in a hover out of ground effects. No added lift due to forward flight.
-Stock helicopter new out of box
-100% travel on throttle no expo no dual rate
-50% pitch = 0 deg and 100% pitch=20 deg.
Place helicopter on a gram scale. This like most read positive and negative. Use insulation foam strip from Home Depot between helicopter and stand. Without foam strip, there would be horrendous vibration from V120D02 experiance. DuraTrax ICE battery charger in motor break in mode for power supply. It lets you set voltage and tells you current. Great charger by the way.
Run helicopter at various settings, and record data.

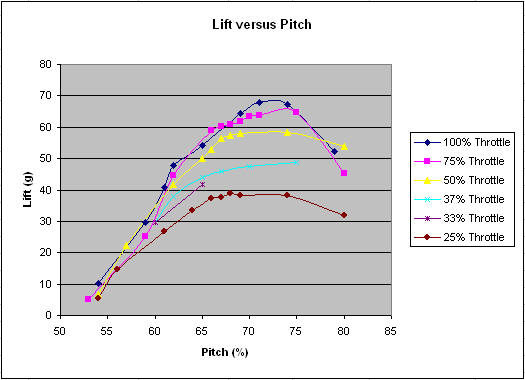
Note that after about 75% pitch, helicopter does not generate any more lift. The motor stalls. I think the motor with the 9T is geared too high for the helicopter. This may have been done for high head speed, but tend to lug the motor.
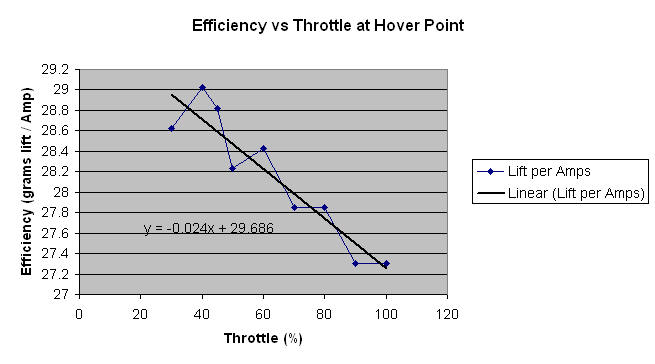
The above curve is generated by setting the throttle at a fixed %, then vary the pitch until the helicopter just lifts off. This shows that efficiency drop about 5% when hovering at 25% throttle to hovering at 100% throttle.
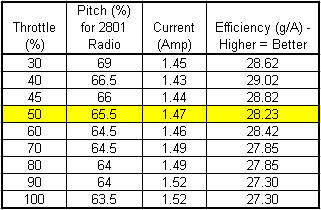
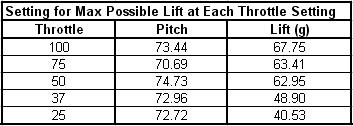
Chart above shows the throttle and pitch necessary to hover the helicopter. 50% throttle is chosen as a compromise between power and efficiency. Motor was relatively cool between 40-50% throttle after about half a minute of running. At 60-70% throttle, motor starts to get medium hot after 30 seconds of running. 50% throttle is a good setting to have a cooler motor.